A foundational class for implementing custom worker threads. More...
#include <thread_base.h>
Public Member Functions | |
| thread_base (const thread_base &)=delete | |
| thread_base & | operator= (const thread_base &)=delete |
| thread_base (thread_base &&)=delete | |
| thread_base & | operator= (thread_base &&)=delete |
| thread_base (const std::string &thread_title="thread_base") | |
Constructs a new thread_base object. | |
| virtual | ~thread_base (void) |
| Virtual destructor. Ensures proper cleanup of derived classes. | |
| auto | set_wake_interval (const std::optional< std::chrono::milliseconds > &wake_interval) -> void |
| Sets the interval at which the worker thread should wake up (if any). | |
| auto | get_wake_interval () const -> std::optional< std::chrono::milliseconds > |
| Gets the current wake interval setting. | |
| auto | start (void) -> common::VoidResult |
| Starts the worker thread. | |
| auto | stop (void) -> common::VoidResult |
| Requests the worker thread to stop and waits for it to finish. | |
| auto | get_thread_title () const -> std::string |
| Returns the worker thread's title. | |
| auto | is_running () const -> bool |
| Checks whether the worker thread is currently running. | |
| auto | get_thread_id () const -> std::thread::id |
| Gets the native thread ID of the worker thread. | |
| virtual auto | to_string (void) const -> std::string |
Returns a string representation of this thread_base object. | |
Protected Member Functions | |
| virtual auto | should_continue_work (void) const -> bool |
| Determines whether the thread should continue doing work. | |
| virtual auto | before_start (void) -> common::VoidResult |
| Called just before the worker thread starts running. | |
| virtual auto | do_work (void) -> common::VoidResult |
| The main work routine for the worker thread. | |
| virtual auto | after_stop (void) -> common::VoidResult |
| Called immediately after the worker thread has stopped. | |
| virtual auto | on_stop_requested (void) -> void |
| Called when stop() is requested, before the thread actually stops. | |
Protected Attributes | |
| std::optional< std::chrono::milliseconds > | wake_interval_ |
| Interval at which the thread is optionally awakened. | |
Private Attributes | |
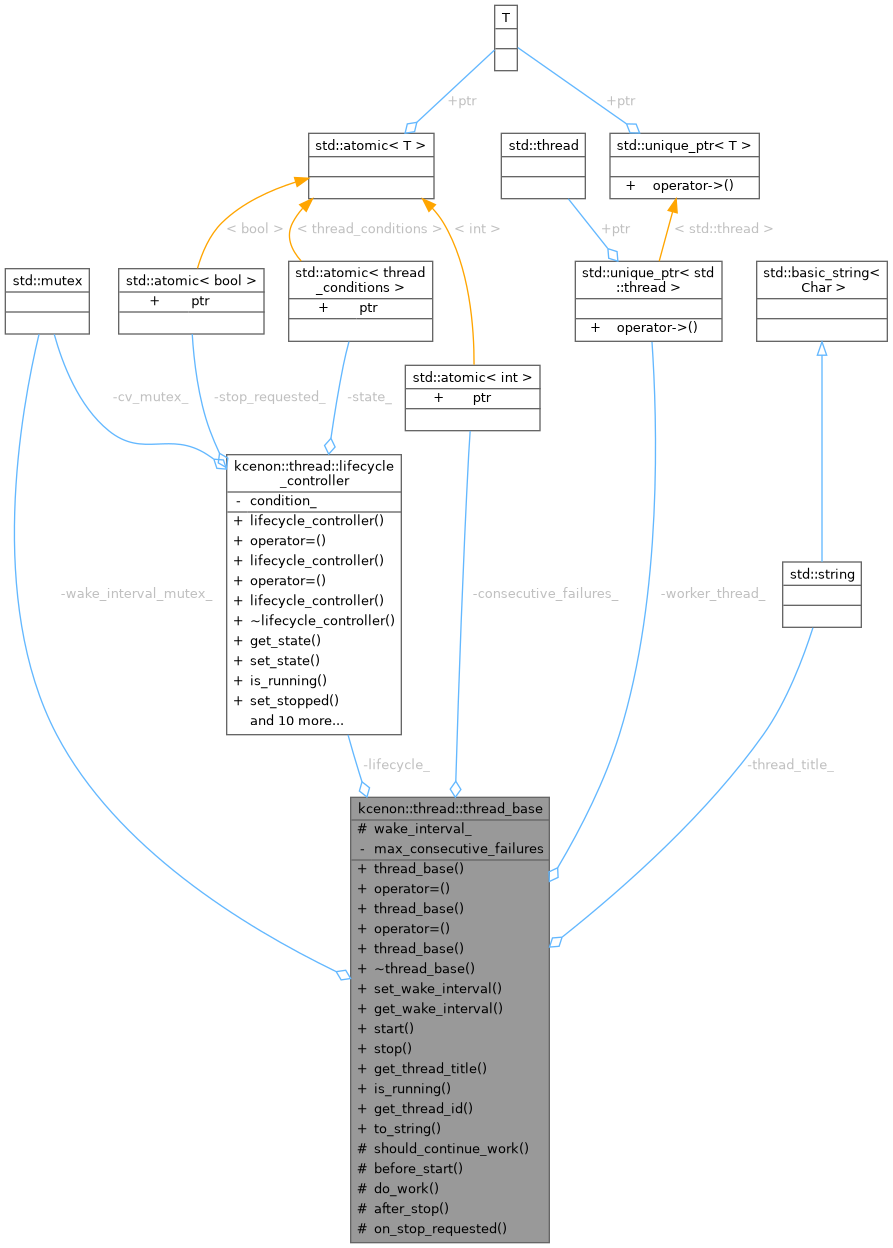
| std::atomic< int > | consecutive_failures_ {0} |
| Counter for consecutive failures in do_work() execution. | |
| std::mutex | wake_interval_mutex_ |
| Mutex for synchronizing access to the wake_interval_ member. | |
| lifecycle_controller | lifecycle_ |
| Lifecycle controller managing thread state and synchronization. | |
| std::unique_ptr< std::thread > | worker_thread_ |
A std::thread for managing the worker thread's lifecycle (legacy mode). | |
| std::string | thread_title_ |
| A string title for identifying or naming the worker thread. | |
Static Private Attributes | |
| static constexpr int | max_consecutive_failures = 10 |
| Maximum number of consecutive failures before stopping the thread. | |
Detailed Description
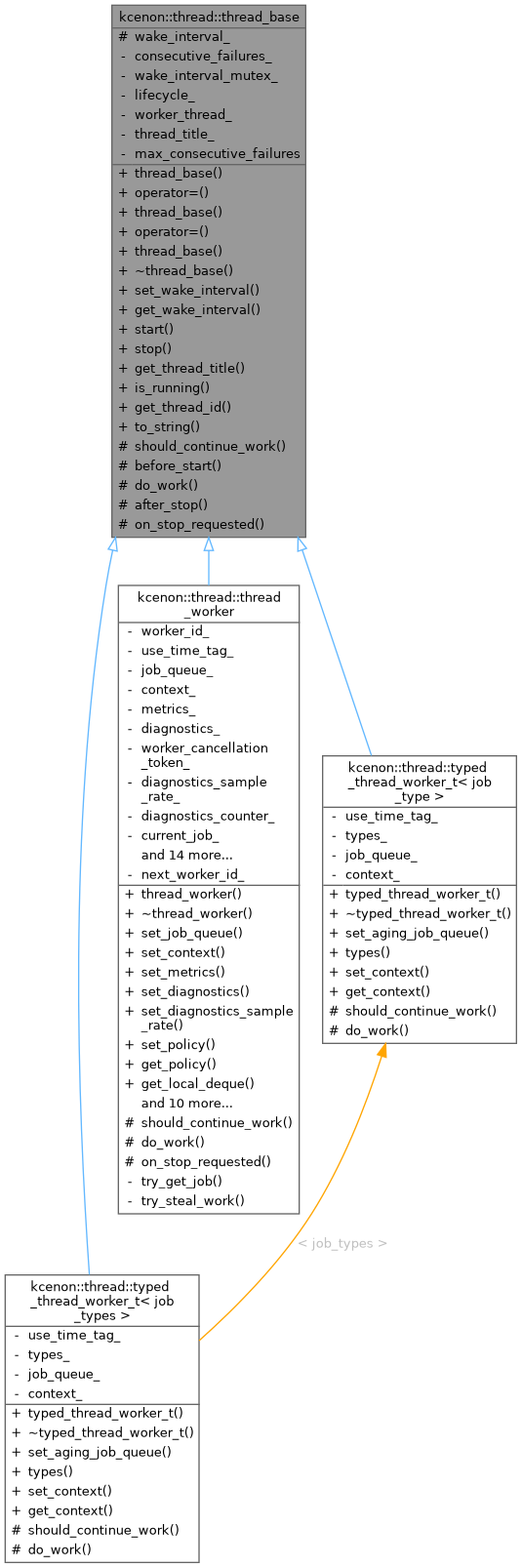
A foundational class for implementing custom worker threads.
The thread_base class provides a framework for managing a single worker thread, offering lifecycle methods (start, stop), optional wake intervals, and hooks (before_start, do_work, after_stop) for derived classes to customize behavior.
This class abstracts platform-specific thread management details and provides a unified interface for both C++20 std::jthread and traditional std::thread, selected at compile time via the USE_STD_JTHREAD macro.
Key Features
- Standardized thread lifecycle management (start/stop)
- Thread condition monitoring
- Customizable worker behavior through virtual method overrides
- Optional periodic wake intervals for recurring tasks
- Built-in cancellation support (via
std::jthreador custom mechanism) - Thread-safe signaling and state management
Thread Safety
All public methods in thread_base are thread-safe. The class uses internal synchronization mechanisms to protect its state.
Typical Usage
- Inherit from
thread_baseand overridedo_work(),before_start(), and/orafter_stop()as needed. - Instantiate your derived class, set a wake interval if desired, then call
start()to launch the thread. - When shutting down or no longer needing the thread's work, call
stop(). - The thread can periodically check
should_continue_work()or internal conditions to determine if it should continue running.
Example
- See also
- kcenon::thread::job For the work unit class processed by workers
- kcenon::thread::job_queue For the thread-safe queue used with workers
- kcenon::thread::thread_worker For a specialized worker implementation
Definition at line 141 of file thread_base.h.
Constructor & Destructor Documentation
◆ thread_base() [1/3]
|
delete |
◆ thread_base() [2/3]
|
delete |
◆ thread_base() [3/3]
| kcenon::thread::thread_base::thread_base | ( | const std::string & | thread_title = "thread_base" | ) |
Constructs a new thread_base object.
Constructs a new thread_base instance with the specified title.
- Parameters
-
thread_title A human-readable title for this worker thread (default: "thread_base").
The thread_title can be useful for logging, debugging, or thread naming (where the platform supports it).
Implementation details:
- Initializes the worker_thread_ pointer to nullptr (thread not started)
- lifecycle_controller handles stop control and state management
- Sets wake_interval_ to std::nullopt (no periodic wake-ups by default)
- Sets thread_title_ to the provided title
Definition at line 27 of file thread_base.cpp.
◆ ~thread_base()
|
virtual |
Virtual destructor. Ensures proper cleanup of derived classes.
Destroys the thread_base instance, stopping the thread if needed.
If the thread is still running when the destructor is called, stop() is typically called internally to join the thread before destruction.
Implementation details:
- Calls stop() to ensure the thread is properly terminated
- The stop() method handles joining the thread and cleaning up resources
- This ensures no thread resources are leaked when the object is destroyed
- Note
- This destructor is virtual, allowing derived classes to perform their own cleanup operations in their destructors.
Definition at line 46 of file thread_base.cpp.
References stop().

Member Function Documentation
◆ after_stop()
|
inlineprotectedvirtual |
Called immediately after the worker thread has stopped.
- Returns
common::VoidResultcontaining an error on failure, or success value if successful.
Override this method in derived classes to perform any cleanup or finalization tasks once the worker thread has fully exited.
Definition at line 283 of file thread_base.h.
◆ before_start()
|
inlineprotectedvirtual |
Called just before the worker thread starts running.
- Returns
common::VoidResultcontaining an error on failure, or success value if successful.
Override this method in derived classes to perform any initialization or setup required before the worker thread begins its main loop.
Definition at line 264 of file thread_base.h.
◆ do_work()
|
inlineprotectedvirtual |
The main work routine for the worker thread.
- Returns
common::VoidResultcontaining an error on failure, or success value if successful.
Derived classes should override this method to implement the actual work the thread needs to perform. This method is called repeatedly (in an internal loop) until the thread is signaled to stop or should_continue_work() returns false.
Reimplemented in kcenon::thread::thread_worker, kcenon::thread::typed_thread_worker_t< job_type >, and kcenon::thread::typed_thread_worker_t< job_types >.
Definition at line 274 of file thread_base.h.
◆ get_thread_id()
|
nodiscard |
Gets the native thread ID of the worker thread.
- Returns
- The std::thread::id of the worker thread, or default-constructed id if the thread is not running.
Thread Safety:
- Safe to call from any thread
- Returns valid ID only when thread is running
Implementation details:
- Returns the std::thread::id from the underlying thread object
- Returns default-constructed (empty) id if thread is not running
- Thread-safe as worker_thread_ pointer is only modified in start()/stop()
- Returns
- The std::thread::id of the worker thread
Definition at line 355 of file thread_base.cpp.
References worker_thread_.
◆ get_thread_title()
|
inlinenodiscard |
Returns the worker thread's title.
- Returns
- A string representing the thread's title.
Definition at line 215 of file thread_base.h.
References thread_title_.
◆ get_wake_interval()
|
nodiscard |
Gets the current wake interval setting.
- Returns
- The wake interval if set, or
std::nulloptif periodic wake-ups are disabled.
- Note
- This method is thread-safe.
Implementation details:
- Uses the same mutex as set_wake_interval() for consistency
- Returns a copy of the current wake_interval_ value
- std::nullopt indicates no periodic wake-ups are configured
Thread Safety:
- Safe to call from any thread concurrently with set_wake_interval()
- The mutex ensures consistent reads even during concurrent modifications
- Returns
- Current wake interval or std::nullopt if disabled
Definition at line 83 of file thread_base.cpp.
References wake_interval_, and wake_interval_mutex_.
◆ is_running()
|
nodiscard |
Checks whether the worker thread is currently running.
Checks if the worker thread is currently active.
- Returns
trueif the thread is running,falseotherwise.
This depends on the thread's internal condition state (e.g., thread_conditions::running).
Implementation details:
- Uses lifecycle_controller for state checking
- Considers both Working and Waiting states as "running"
- Thread-safe operation
- Returns
- true if thread is actively running (Working or Waiting)
Definition at line 324 of file thread_base.cpp.
◆ on_stop_requested()
|
inlineprotectedvirtual |
Called when stop() is requested, before the thread actually stops.
This hook allows derived classes to perform cancellation-related operations, such as signaling running jobs to cancel. This is called from the thread requesting the stop (not from the worker thread itself).
The default implementation does nothing. Override this to propagate cancellation signals to any active work items.
Thread Safety:
- Called from the thread calling stop()
- May be called concurrently with do_work()
- Implementations must be thread-safe
- Note
- This is called after the stop flag is set but before joining the thread
Reimplemented in kcenon::thread::thread_worker.
Definition at line 302 of file thread_base.h.
◆ operator=() [1/2]
|
delete |
◆ operator=() [2/2]
|
delete |
◆ set_wake_interval()
| auto kcenon::thread::thread_base::set_wake_interval | ( | const std::optional< std::chrono::milliseconds > & | wake_interval | ) | -> void |
Sets the interval at which the worker thread should wake up (if any).
Sets the wake interval for periodic thread wake-ups.
- Parameters
-
wake_interval Duration in milliseconds for periodic wake-ups, or std::nulloptto disable periodic wake-ups.
If a wake interval is set, the worker thread can periodically perform some action (e.g., housekeeping tasks) even if there's no immediate external signal.
- Note
- This method is thread-safe.
Implementation details:
- Uses a dedicated mutex (wake_interval_mutex_) to ensure thread-safe access
- The scoped_lock ensures automatic release when the function exits
- This interval controls how often the thread wakes up even when idle
- Setting std::nullopt disables periodic wake-ups (thread only wakes on signals)
Thread Safety:
- Safe to call from any thread while the worker thread is running
- The wake_interval_mutex_ protects against data races with get_wake_interval()
Definition at line 61 of file thread_base.cpp.
◆ should_continue_work()
|
inlinenodiscardprotectedvirtual |
Determines whether the thread should continue doing work.
- Returns
trueif there is work to do,falseotherwise.
The default implementation always returns false (indicating no ongoing work). Override this in derived classes if you wish the thread to perform repeated tasks until some condition changes.
Reimplemented in kcenon::thread::thread_worker, kcenon::thread::typed_thread_worker_t< job_type >, and kcenon::thread::typed_thread_worker_t< job_types >.
Definition at line 255 of file thread_base.h.
◆ start()
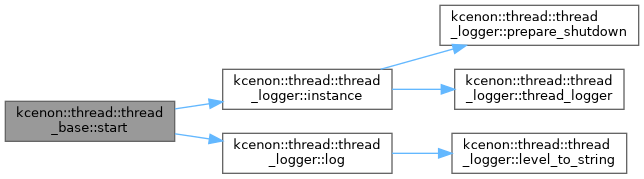
| auto kcenon::thread::thread_base::start | ( | void | ) | -> common::VoidResult |
Starts the worker thread.
Starts the worker thread and begins execution loop.
- Returns
common::VoidResultcontaining an error on failure, or success value if successful.
Internally, this method:
- Calls
before_start()to allow derived classes to perform setup. - Spawns a new thread (using either
std::jthreadorstd::thread). - Repeatedly calls
do_work()until the thread is signaled to stop.
Implementation details:
- First checks if thread is already running via lifecycle_controller
- Calls stop() first to ensure clean state (idempotent operation)
- Initializes lifecycle_controller for the new thread
- Creates worker thread that executes the main work loop
Main Work Loop Logic:
- Calls before_start() hook for derived class initialization
- Enters main loop while not stopped and has work to do
- Uses lifecycle_controller for state and wait management
- Calls do_work() hook for actual work execution
- Handles exceptions from do_work() gracefully
- Calls after_stop() hook for cleanup when exiting
- Returns
- Empty result on success, error on failure
Definition at line 110 of file thread_base.cpp.
References kcenon::thread::critical, kcenon::thread::error, kcenon::thread::thread_logger::instance(), kcenon::thread::thread_logger::log(), kcenon::thread::resource_allocation_failed, kcenon::thread::Stopping, kcenon::thread::thread_already_running, kcenon::thread::Waiting, and kcenon::thread::Working.
◆ stop()
| auto kcenon::thread::thread_base::stop | ( | void | ) | -> common::VoidResult |
Requests the worker thread to stop and waits for it to finish.
Stops the worker thread and waits for it to complete.
- Returns
common::VoidResultcontaining an error on failure, or success value if successful.
Internally, this method:
- Signals the thread to stop (via
stop_source_orstop_requested_). - Joins the thread, ensuring it has fully exited.
- Calls
after_stop()for post-shutdown cleanup in derived classes.
Implementation details:
- This method is idempotent - safe to call multiple times
- First checks if there's actually a thread to stop
- Uses lifecycle_controller for stop signaling and state management
- Notifies condition variable to wake up waiting thread
- Joins the thread to wait for complete shutdown
- Cleans up all thread-related resources
Shutdown Sequence:
- Signal stop request via lifecycle_controller
- Call derived class hook for cancellation propagation
- Notify condition variable to wake sleeping thread
- Wait for thread to exit its main loop and complete after_stop()
- Clean up thread object and reset lifecycle_controller
- Returns
- Empty result on success, error if thread wasn't running
Definition at line 271 of file thread_base.cpp.
References kcenon::thread::invalid_argument, and kcenon::thread::thread_not_running.
Referenced by ~thread_base().

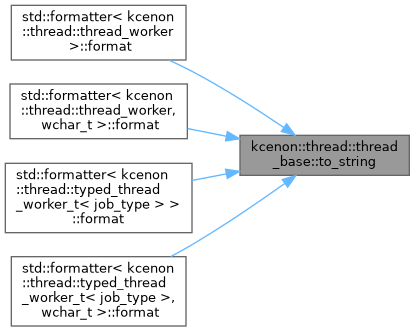
◆ to_string()
|
nodiscardvirtual |
Returns a string representation of this thread_base object.
Provides a string representation of the thread's current state.
- Returns
- A string containing descriptive or diagnostic information about the thread.
Derived classes may override this to include additional details (e.g., current status, counters, or other state).
Implementation details:
- Uses the formatter utility to create consistent output format
- Includes both thread title and current condition
- Useful for logging and debugging purposes
- Thread-safe via lifecycle_controller
- Returns
- Formatted string showing thread title and current state
Definition at line 340 of file thread_base.cpp.
References utility_module::formatter::format().
Referenced by std::formatter< kcenon::thread::thread_worker >::format(), std::formatter< kcenon::thread::thread_worker, wchar_t >::format(), std::formatter< kcenon::thread::typed_thread_worker_t< job_type > >::format(), and std::formatter< kcenon::thread::typed_thread_worker_t< job_type >, wchar_t >::format().

Member Data Documentation
◆ consecutive_failures_
|
private |
Counter for consecutive failures in do_work() execution.
This counter is incremented each time do_work() throws an exception. It is reset to 0 when do_work() completes successfully. Used to implement exponential backoff and prevent infinite error loops.
Definition at line 323 of file thread_base.h.
◆ lifecycle_
|
private |
Lifecycle controller managing thread state and synchronization.
Consolidates condition variable, mutex, stop request, and state management into a single reusable component.
Definition at line 347 of file thread_base.h.
◆ max_consecutive_failures
|
staticconstexprprivate |
Maximum number of consecutive failures before stopping the thread.
If do_work() throws exceptions this many times in a row, the thread will stop automatically to prevent infinite error loops and resource exhaustion.
Definition at line 331 of file thread_base.h.
◆ thread_title_
|
private |
A string title for identifying or naming the worker thread.
Definition at line 368 of file thread_base.h.
Referenced by get_thread_title().
◆ wake_interval_
|
protected |
Interval at which the thread is optionally awakened.
If set, the worker thread can wake periodically (in addition to any other wake conditions) to perform tasks at regular intervals.
- Note
- Access to this member must be synchronized using wake_interval_mutex_
Definition at line 313 of file thread_base.h.
Referenced by get_wake_interval().
◆ wake_interval_mutex_
|
mutableprivate |
Mutex for synchronizing access to the wake_interval_ member.
This mutex must be acquired when reading or writing wake_interval_ to prevent data races between the setter and the worker thread.
Definition at line 339 of file thread_base.h.
Referenced by get_wake_interval().
◆ worker_thread_
|
private |
A std::thread for managing the worker thread's lifecycle (legacy mode).
If USE_STD_JTHREAD is not defined, we fall back to a standard thread.
Definition at line 362 of file thread_base.h.
Referenced by get_thread_id().
The documentation for this class was generated from the following files:
- include/kcenon/thread/core/thread_base.h
- src/core/thread_base.cpp