Centralized thread lifecycle state and synchronization management. More...
#include <lifecycle_controller.h>
Public Member Functions | |
| lifecycle_controller (const lifecycle_controller &)=delete | |
| lifecycle_controller & | operator= (const lifecycle_controller &)=delete |
| lifecycle_controller (lifecycle_controller &&)=delete | |
| lifecycle_controller & | operator= (lifecycle_controller &&)=delete |
| lifecycle_controller () | |
| Constructs a new lifecycle_controller in Created state. | |
| ~lifecycle_controller ()=default | |
| Destructor. | |
| auto | get_state () const noexcept -> thread_conditions |
| Gets the current thread condition/state. | |
| auto | set_state (thread_conditions state) noexcept -> void |
| Sets the thread condition/state. | |
| auto | is_running () const noexcept -> bool |
| Checks if the thread is currently running. | |
| auto | set_stopped () noexcept -> void |
| Marks the thread as stopped. | |
| auto | initialize_for_start () -> void |
| Initializes the controller for a new thread start. | |
| auto | request_stop () noexcept -> void |
| Requests the thread to stop. | |
| auto | is_stop_requested () const noexcept -> bool |
| Checks if a stop has been requested. | |
| auto | has_active_source () const noexcept -> bool |
| Checks if the controller has an active stop source (C++20 only). | |
| auto | reset_stop_source () noexcept -> void |
| Resets the stop control mechanism after thread completion. | |
| auto | acquire_lock () -> std::unique_lock< std::mutex > |
| Acquires a unique lock on the condition variable mutex. | |
| template<typename Predicate > | |
| auto | wait (std::unique_lock< std::mutex > &lock, Predicate pred) -> void |
| Waits on the condition variable with a predicate. | |
| template<typename Rep , typename Period , typename Predicate > | |
| auto | wait_for (std::unique_lock< std::mutex > &lock, const std::chrono::duration< Rep, Period > &timeout, Predicate pred) -> bool |
| Waits on the condition variable with a timeout and predicate. | |
| auto | notify_one () -> void |
| Notifies one waiting thread. | |
| auto | notify_all () -> void |
| Notifies all waiting threads. | |
Private Attributes | |
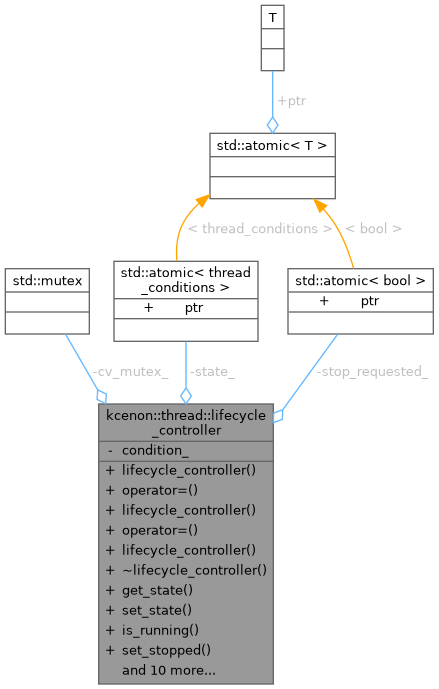
| std::mutex | cv_mutex_ |
| Mutex for condition variable operations. | |
| std::condition_variable | condition_ |
| Condition variable for thread signaling. | |
| std::atomic< thread_conditions > | state_ {thread_conditions::Created} |
| Current thread state. | |
| std::atomic< bool > | stop_requested_ {false} |
| Atomic flag for stop request (legacy mode). | |
Detailed Description
Centralized thread lifecycle state and synchronization management.
The lifecycle_controller class consolidates duplicated thread lifecycle management patterns (start, stop, state transitions, condition variables) into a single reusable component. Thread classes can use composition with this controller instead of implementing these patterns themselves.
Key Features
- Thread state management (Created, Waiting, Working, Stopping, Stopped)
- Condition variable signaling for wake-ups
- Stop request handling (supports both std::jthread and legacy std::thread)
- Thread-safe state queries and transitions
Thread Safety
All public methods are thread-safe. The class uses internal synchronization to protect state transitions and condition variable operations.
Example Usage
Definition at line 79 of file lifecycle_controller.h.
Constructor & Destructor Documentation
◆ lifecycle_controller() [1/3]
|
delete |
◆ lifecycle_controller() [2/3]
|
delete |
◆ lifecycle_controller() [3/3]
| kcenon::thread::lifecycle_controller::lifecycle_controller | ( | ) |
Constructs a new lifecycle_controller in Created state.
Definition at line 9 of file lifecycle_controller.cpp.
◆ ~lifecycle_controller()
|
default |
Destructor.
Member Function Documentation
◆ acquire_lock()
|
nodiscard |
Acquires a unique lock on the condition variable mutex.
- Returns
- A unique_lock holding the mutex.
Use this to prepare for wait operations.
Definition at line 95 of file lifecycle_controller.cpp.
◆ get_state()
|
nodiscardnoexcept |
Gets the current thread condition/state.
- Returns
- The current thread_conditions value.
Thread Safety:
- Safe to call from any thread
- Uses atomic load with acquire memory ordering
Definition at line 19 of file lifecycle_controller.cpp.
References state_.
◆ has_active_source()
|
nodiscardnoexcept |
Checks if the controller has an active stop source (C++20 only).
- Returns
- true if a stop_source is active, false otherwise.
In legacy mode, checks if stop has NOT been requested (indicating active state).
Definition at line 76 of file lifecycle_controller.cpp.
References state_, kcenon::thread::Waiting, and kcenon::thread::Working.
◆ initialize_for_start()
| auto kcenon::thread::lifecycle_controller::initialize_for_start | ( | ) | -> void |
Initializes the controller for a new thread start.
Resets the stop request flag and prepares for a new thread lifecycle. In C++20 jthread mode, creates a new stop_source.
- Note
- Must be called before spawning the worker thread.
Definition at line 41 of file lifecycle_controller.cpp.
References kcenon::thread::Created.
◆ is_running()
|
nodiscardnoexcept |
Checks if the thread is currently running.
- Returns
- true if state is Working or Waiting, false otherwise.
Definition at line 29 of file lifecycle_controller.cpp.
References state_, kcenon::thread::Waiting, and kcenon::thread::Working.
◆ is_stop_requested()
|
nodiscardnoexcept |
Checks if a stop has been requested.
- Returns
- true if stop has been requested, false otherwise.
Thread Safety:
- Safe to call from any thread
Definition at line 63 of file lifecycle_controller.cpp.
References stop_requested_.
◆ notify_all()
| auto kcenon::thread::lifecycle_controller::notify_all | ( | ) | -> void |
Notifies all waiting threads.
Thread Safety:
- Safe to call from any thread
Definition at line 106 of file lifecycle_controller.cpp.
◆ notify_one()
| auto kcenon::thread::lifecycle_controller::notify_one | ( | ) | -> void |
Notifies one waiting thread.
Thread Safety:
- Safe to call from any thread
Definition at line 100 of file lifecycle_controller.cpp.
◆ operator=() [1/2]
|
delete |
◆ operator=() [2/2]
|
delete |
◆ request_stop()
|
noexcept |
Requests the thread to stop.
In C++20 mode, calls request_stop() on the stop_source. In legacy mode, sets the atomic stop_requested_ flag to true.
Thread Safety:
- Safe to call from any thread
- The request is visible to the worker thread immediately
Definition at line 51 of file lifecycle_controller.cpp.
References stop_requested_.
◆ reset_stop_source()
|
noexcept |
Resets the stop control mechanism after thread completion.
In C++20 mode, resets the stop_source. Should be called after thread join to clean up resources.
Definition at line 88 of file lifecycle_controller.cpp.
◆ set_state()
|
noexcept |
Sets the thread condition/state.
- Parameters
-
state The new thread_conditions value.
Thread Safety:
- Safe to call from any thread
- Uses atomic store with release memory ordering
Definition at line 24 of file lifecycle_controller.cpp.
Referenced by set_stopped().

◆ set_stopped()
|
noexcept |
Marks the thread as stopped.
Convenience method equivalent to set_state(thread_conditions::Stopped).
Definition at line 36 of file lifecycle_controller.cpp.
References set_state(), and kcenon::thread::Stopped.

◆ wait()
|
inline |
Waits on the condition variable with a predicate.
- Template Parameters
-
Predicate A callable returning bool.
- Parameters
-
lock The unique_lock (must be holding cv_mutex_). pred The predicate to check.
Waits until pred() returns true OR stop is requested.
Definition at line 206 of file lifecycle_controller.h.
◆ wait_for()
|
inline |
Waits on the condition variable with a timeout and predicate.
- Template Parameters
-
Rep Duration rep type. Period Duration period type. Predicate A callable returning bool.
- Parameters
-
lock The unique_lock (must be holding cv_mutex_). timeout The maximum duration to wait. pred The predicate to check.
- Returns
- true if pred() is satisfied, false if timed out.
Definition at line 238 of file lifecycle_controller.h.
Member Data Documentation
◆ condition_
|
private |
Condition variable for thread signaling.
Definition at line 282 of file lifecycle_controller.h.
◆ cv_mutex_
|
private |
Mutex for condition variable operations.
Definition at line 279 of file lifecycle_controller.h.
◆ state_
|
private |
Current thread state.
Definition at line 285 of file lifecycle_controller.h.
Referenced by get_state(), has_active_source(), and is_running().
◆ stop_requested_
|
private |
Atomic flag for stop request (legacy mode).
Definition at line 292 of file lifecycle_controller.h.
Referenced by is_stop_requested(), and request_stop().
The documentation for this class was generated from the following files:
- include/kcenon/thread/core/lifecycle_controller.h
- src/core/lifecycle_controller.cpp