Base interface for thread pool policies. More...
#include <pool_policy.h>
Public Member Functions | |
| virtual | ~pool_policy ()=default |
| Virtual destructor for proper cleanup. | |
| virtual auto | on_enqueue (job &j) -> common::VoidResult=0 |
| Called before a job is enqueued. | |
| virtual void | on_job_start (job &j)=0 |
| Called when a worker starts executing a job. | |
| virtual void | on_job_complete (job &j, bool success, const std::exception *error=nullptr)=0 |
| Called when a job completes (success or failure). | |
| virtual auto | get_name () const -> std::string=0 |
| Gets the policy name for identification and logging. | |
| virtual auto | is_enabled () const -> bool |
| Checks if the policy is currently enabled. | |
| virtual void | set_enabled (bool enabled) |
| Enables or disables the policy. | |
Detailed Description
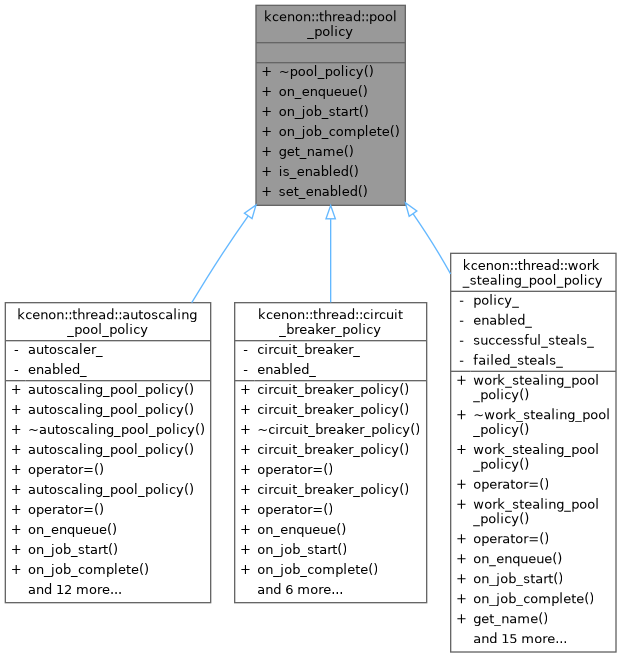
Base interface for thread pool policies.
Policies provide a way to extend thread pool behavior without modifying the thread_pool class itself. This follows the Strategy pattern and Single Responsibility Principle (SRP).
Design Principles
- Extensibility: New behaviors can be added by implementing this interface
- Composability: Multiple policies can be combined in a thread pool
- Non-intrusive: Policies don't require changes to core thread_pool code
- Testability: Each policy can be unit tested independently
Lifecycle Hooks
Policies receive callbacks at key points in the job lifecycle:
on_enqueue(): Called before a job is added to the queueon_job_start(): Called when a worker begins executing a jobon_job_complete(): Called when a job finishes (success or failure)
Thread Safety
All methods must be thread-safe as they may be called from multiple workers.
Usage Example
- See also
- circuit_breaker_policy
Definition at line 80 of file pool_policy.h.
Constructor & Destructor Documentation
◆ ~pool_policy()
|
virtualdefault |
Virtual destructor for proper cleanup.
Member Function Documentation
◆ get_name()
|
nodiscardpure virtual |
Gets the policy name for identification and logging.
- Returns
- Policy name string.
Implemented in kcenon::thread::autoscaling_pool_policy, kcenon::thread::circuit_breaker_policy, and kcenon::thread::work_stealing_pool_policy.
◆ is_enabled()
|
inlinenodiscardvirtual |
Checks if the policy is currently enabled.
- Returns
- True if policy is active.
Reimplemented in kcenon::thread::autoscaling_pool_policy, kcenon::thread::circuit_breaker_policy, and kcenon::thread::work_stealing_pool_policy.
Definition at line 146 of file pool_policy.h.
◆ on_enqueue()
|
pure virtual |
Called before a job is enqueued.
- Parameters
-
j Reference to the job being enqueued.
- Returns
- common::VoidResult - ok() to allow, error to reject the job.
Policies can use this to:
- Validate the job
- Apply transformations
- Reject jobs based on policy rules (e.g., circuit breaker open)
Thread Safety:
- Must be thread-safe
- Called from the enqueueing thread
Implemented in kcenon::thread::autoscaling_pool_policy, kcenon::thread::circuit_breaker_policy, and kcenon::thread::work_stealing_pool_policy.
◆ on_job_complete()
|
pure virtual |
Called when a job completes (success or failure).
- Parameters
-
j Reference to the completed job. success True if job completed successfully. error Pointer to exception if job failed, nullptr otherwise.
Policies can use this to:
- Record success/failure metrics
- Update circuit breaker state
- Log completion
Thread Safety:
- Must be thread-safe
- Called from the worker thread
Implemented in kcenon::thread::autoscaling_pool_policy, kcenon::thread::circuit_breaker_policy, and kcenon::thread::work_stealing_pool_policy.
◆ on_job_start()
|
pure virtual |
Called when a worker starts executing a job.
- Parameters
-
j Reference to the job being started.
Policies can use this to:
- Start timing
- Update metrics
- Log job start
Thread Safety:
- Must be thread-safe
- Called from the worker thread
Implemented in kcenon::thread::autoscaling_pool_policy, kcenon::thread::circuit_breaker_policy, and kcenon::thread::work_stealing_pool_policy.
◆ set_enabled()
|
inlinevirtual |
Enables or disables the policy.
- Parameters
-
enabled Whether to enable the policy.
Disabled policies have their hooks called but should no-op.
Reimplemented in kcenon::thread::autoscaling_pool_policy, kcenon::thread::circuit_breaker_policy, and kcenon::thread::work_stealing_pool_policy.
Definition at line 154 of file pool_policy.h.
The documentation for this class was generated from the following file:
- include/kcenon/thread/pool_policies/pool_policy.h