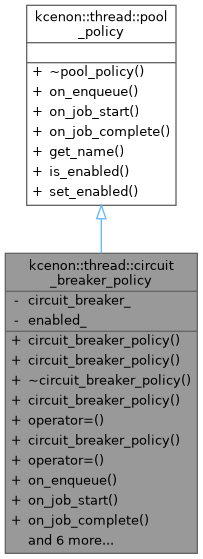
Pool policy that implements circuit breaker pattern for failure protection. More...
#include <circuit_breaker_policy.h>
Public Member Functions | |
| circuit_breaker_policy (const circuit_breaker_config &config={}) | |
| Constructs a circuit breaker policy with the given configuration. | |
| circuit_breaker_policy (std::shared_ptr< circuit_breaker > cb) | |
| Constructs a circuit breaker policy with an existing circuit breaker. | |
| ~circuit_breaker_policy () override=default | |
| Destructor. | |
| circuit_breaker_policy (const circuit_breaker_policy &)=delete | |
| circuit_breaker_policy & | operator= (const circuit_breaker_policy &)=delete |
| circuit_breaker_policy (circuit_breaker_policy &&)=delete | |
| circuit_breaker_policy & | operator= (circuit_breaker_policy &&)=delete |
| auto | on_enqueue (job &j) -> common::VoidResult override |
| Checks circuit state before allowing job enqueue. | |
| void | on_job_start (job &j) override |
| Called when job starts executing. | |
| void | on_job_complete (job &j, bool success, const std::exception *error=nullptr) override |
| Records job completion in the circuit breaker. | |
| auto | get_name () const -> std::string override |
| Gets the policy name. | |
| auto | is_enabled () const -> bool override |
| Checks if the policy is enabled. | |
| void | set_enabled (bool enabled) override |
| Enables or disables the policy. | |
| auto | is_accepting_work () const -> bool |
| Checks if the circuit is accepting work. | |
| auto | get_state () const -> circuit_state |
| Gets the current circuit state. | |
| auto | get_circuit_breaker () const -> std::shared_ptr< circuit_breaker > |
| Gets the underlying circuit breaker. | |
 Public Member Functions inherited from kcenon::thread::pool_policy Public Member Functions inherited from kcenon::thread::pool_policy | |
| virtual | ~pool_policy ()=default |
| Virtual destructor for proper cleanup. | |
Private Attributes | |
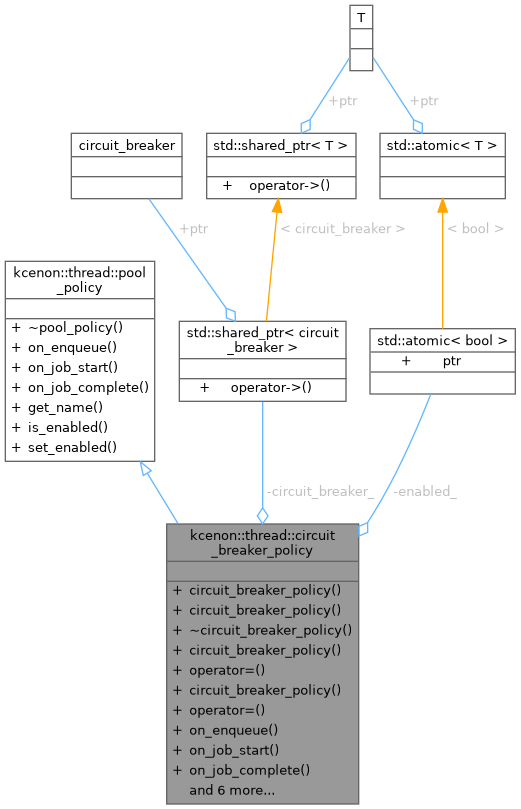
| std::shared_ptr< circuit_breaker > | circuit_breaker_ |
| std::atomic< bool > | enabled_ {true} |
Detailed Description
Pool policy that implements circuit breaker pattern for failure protection.
This policy wraps the circuit breaker functionality as a composable pool policy, enabling circuit breaker protection without modifying the thread_pool class.
Circuit Breaker Pattern
The circuit breaker monitors job failures and automatically opens when a threshold is exceeded, preventing cascading failures:
- CLOSED: Normal operation, all jobs allowed
- OPEN: Failure threshold exceeded, jobs rejected immediately
- HALF_OPEN: Testing recovery, limited jobs allowed
Thread Safety
All methods are thread-safe and can be called from any thread.
Usage Example
- See also
- pool_policy
- circuit_breaker
- circuit_breaker_config
Definition at line 66 of file circuit_breaker_policy.h.
Constructor & Destructor Documentation
◆ circuit_breaker_policy() [1/4]
|
explicit |
Constructs a circuit breaker policy with the given configuration.
- Parameters
-
config Circuit breaker configuration.
Definition at line 12 of file circuit_breaker_policy.cpp.
◆ circuit_breaker_policy() [2/4]
|
explicit |
Constructs a circuit breaker policy with an existing circuit breaker.
- Parameters
-
cb Shared pointer to an existing circuit breaker.
This allows sharing a circuit breaker across multiple pools or components.
Definition at line 17 of file circuit_breaker_policy.cpp.
References circuit_breaker_.
◆ ~circuit_breaker_policy()
|
overridedefault |
Destructor.
◆ circuit_breaker_policy() [3/4]
|
delete |
◆ circuit_breaker_policy() [4/4]
|
delete |
Member Function Documentation
◆ get_circuit_breaker()
|
nodiscard |
Gets the underlying circuit breaker.
- Returns
- Shared pointer to the circuit breaker.
Useful for sharing the circuit breaker with other components or for advanced circuit breaker operations.
Definition at line 100 of file circuit_breaker_policy.cpp.
References circuit_breaker_.
◆ get_name()
|
nodiscardoverridevirtual |
Gets the policy name.
- Returns
- "circuit_breaker_policy"
Implements kcenon::thread::pool_policy.
Definition at line 70 of file circuit_breaker_policy.cpp.
◆ get_state()
|
nodiscard |
Gets the current circuit state.
- Returns
- Current circuit_state.
Definition at line 95 of file circuit_breaker_policy.cpp.
References circuit_breaker_.
◆ is_accepting_work()
|
nodiscard |
Checks if the circuit is accepting work.
- Returns
- True if circuit is closed or half-open with capacity.
Definition at line 85 of file circuit_breaker_policy.cpp.
References circuit_breaker_, and enabled_.
◆ is_enabled()
|
nodiscardoverridevirtual |
Checks if the policy is enabled.
- Returns
- True if enabled.
Reimplemented from kcenon::thread::pool_policy.
Definition at line 75 of file circuit_breaker_policy.cpp.
References enabled_.
◆ on_enqueue()
|
overridevirtual |
Checks circuit state before allowing job enqueue.
- Parameters
-
j Reference to the job being enqueued.
- Returns
- common::ok() if allowed, error if circuit is open.
When the circuit is open, jobs are rejected immediately with an error indicating the circuit breaker state.
Implements kcenon::thread::pool_policy.
Definition at line 26 of file circuit_breaker_policy.cpp.
References kcenon::thread::circuit_half_open, kcenon::thread::circuit_open, and kcenon::thread::make_error_result().

◆ on_job_complete()
|
overridevirtual |
Records job completion in the circuit breaker.
- Parameters
-
j Reference to the completed job. success True if job succeeded. error Exception pointer if job failed.
This updates the circuit breaker state based on success/failure.
Implements kcenon::thread::pool_policy.
Definition at line 55 of file circuit_breaker_policy.cpp.
References circuit_breaker_, enabled_, and kcenon::thread::success.
◆ on_job_start()
|
overridevirtual |
Called when job starts executing.
- Parameters
-
j Reference to the job.
Records the start time for latency tracking.
Implements kcenon::thread::pool_policy.
Definition at line 49 of file circuit_breaker_policy.cpp.
◆ operator=() [1/2]
|
delete |
◆ operator=() [2/2]
|
delete |
◆ set_enabled()
|
overridevirtual |
Enables or disables the policy.
- Parameters
-
enabled Whether to enable.
Reimplemented from kcenon::thread::pool_policy.
Definition at line 80 of file circuit_breaker_policy.cpp.
References enabled_.
Member Data Documentation
◆ circuit_breaker_
|
private |
Definition at line 172 of file circuit_breaker_policy.h.
Referenced by circuit_breaker_policy(), get_circuit_breaker(), get_state(), is_accepting_work(), and on_job_complete().
◆ enabled_
|
private |
Definition at line 173 of file circuit_breaker_policy.h.
Referenced by is_accepting_work(), is_enabled(), on_job_complete(), and set_enabled().
The documentation for this class was generated from the following files:
- include/kcenon/thread/pool_policies/circuit_breaker_policy.h
- src/pool_policies/circuit_breaker_policy.cpp