Adapter exposing thread_pool through common::interfaces::IExecutor. More...
#include <common_executor_adapter.h>
Public Member Functions | |
| thread_pool_executor_adapter (std::shared_ptr< kcenon::thread::thread_pool > pool) | |
| std::future< void > | submit (std::function< void()> task) |
| std::future< void > | submit_delayed (std::function< void()> task, std::chrono::milliseconds delay) |
| common::Result< std::future< void > > | execute (std::unique_ptr< common::interfaces::IJob > &&job) override |
| common::Result< std::future< void > > | execute_delayed (std::unique_ptr< common::interfaces::IJob > &&job, std::chrono::milliseconds delay) override |
| size_t | worker_count () const override |
| bool | is_running () const override |
| size_t | pending_tasks () const override |
| void | shutdown (bool wait_for_completion=true) override |
| std::shared_ptr< kcenon::thread::thread_pool > | get_thread_pool () const |
Private Attributes | |
| std::shared_ptr< kcenon::thread::thread_pool > | pool_ |
Detailed Description
Adapter exposing thread_pool through common::interfaces::IExecutor.
This is the recommended way to use thread_pool with the IExecutor interface. It provides a clean separation between thread_pool's core functionality and the IExecutor interface contract.
- Example Usage
- #include <kcenon/thread/core/thread_pool.h>// Create and configure the thread poolauto pool = std::make_shared<kcenon::thread::thread_pool>("my_pool");pool->enqueue(std::make_unique<kcenon::thread::thread_worker>());pool->start();// Create the adapter for IExecutor compatibilityauto executor = std::make_shared<kcenon::thread::adapters::thread_pool_executor_adapter>(pool);// Use through IExecutor interfaceauto future = executor->execute(std::make_unique<MyJob>());Adapter to bridge thread_system pools with common IExecutor interface.Core thread pool implementation with work stealing and auto-scaling.
- Note
- The adapter holds a shared_ptr to the thread_pool, ensuring the pool remains alive as long as the adapter exists.
Definition at line 282 of file common_executor_adapter.h.
Constructor & Destructor Documentation
◆ thread_pool_executor_adapter()
|
inlineexplicit |
Definition at line 284 of file common_executor_adapter.h.
Member Function Documentation
◆ execute()
|
inlineoverride |
Definition at line 315 of file common_executor_adapter.h.
References kcenon::thread::job_execution_failed, kcenon::thread::adapters::detail::make_error(), pool_, and kcenon::thread::adapters::detail::schedule_task().

◆ execute_delayed()
|
inlineoverride |
Definition at line 337 of file common_executor_adapter.h.
References kcenon::thread::delay, kcenon::thread::job_execution_failed, kcenon::thread::adapters::detail::make_error(), pool_, and kcenon::thread::adapters::detail::schedule_task_async().

◆ get_thread_pool()
|
inline |
Definition at line 392 of file common_executor_adapter.h.
References pool_.
◆ is_running()
|
inlineoverride |
Definition at line 371 of file common_executor_adapter.h.
References kcenon::thread::thread_pool::is_running(), and pool_.

◆ pending_tasks()
|
inlineoverride |
Definition at line 375 of file common_executor_adapter.h.
References kcenon::thread::thread_pool::get_pending_task_count(), and pool_.

◆ shutdown()
|
inlineoverride |
Definition at line 379 of file common_executor_adapter.h.
References pool_, and kcenon::thread::thread_pool::stop().

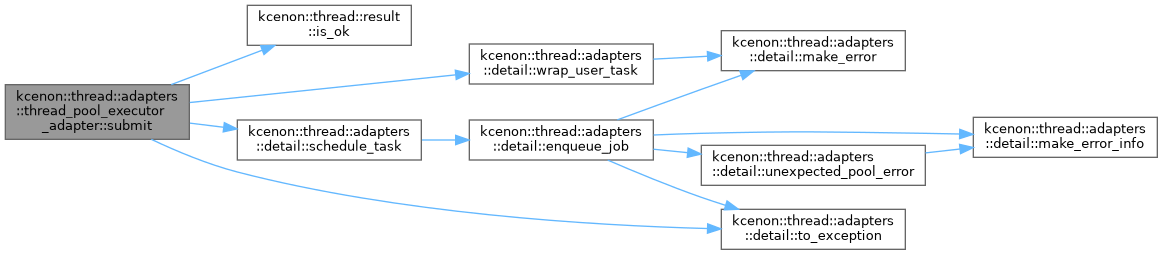
◆ submit()
|
inline |
Definition at line 287 of file common_executor_adapter.h.
References kcenon::thread::failed, kcenon::thread::result< T >::is_ok(), pool_, kcenon::thread::adapters::detail::schedule_task(), kcenon::thread::adapters::detail::to_exception(), and kcenon::thread::adapters::detail::wrap_user_task().
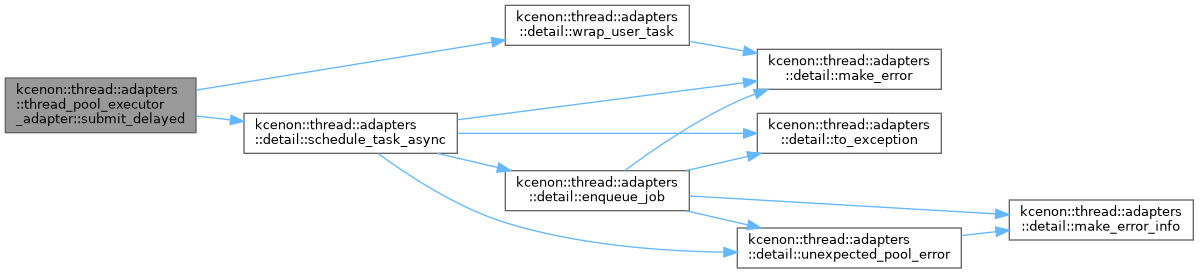
◆ submit_delayed()
|
inline |
Definition at line 301 of file common_executor_adapter.h.
References kcenon::thread::delay, pool_, kcenon::thread::adapters::detail::schedule_task_async(), and kcenon::thread::adapters::detail::wrap_user_task().
◆ worker_count()
|
inlineoverride |
Definition at line 367 of file common_executor_adapter.h.
References kcenon::thread::thread_pool::get_active_worker_count(), and pool_.

Member Data Documentation
◆ pool_
|
private |
Definition at line 397 of file common_executor_adapter.h.
Referenced by execute(), execute_delayed(), get_thread_pool(), is_running(), pending_tasks(), shutdown(), submit(), submit_delayed(), and worker_count().
The documentation for this class was generated from the following file:
- include/kcenon/thread/adapters/common_executor_adapter.h