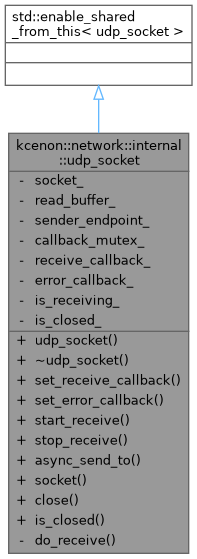
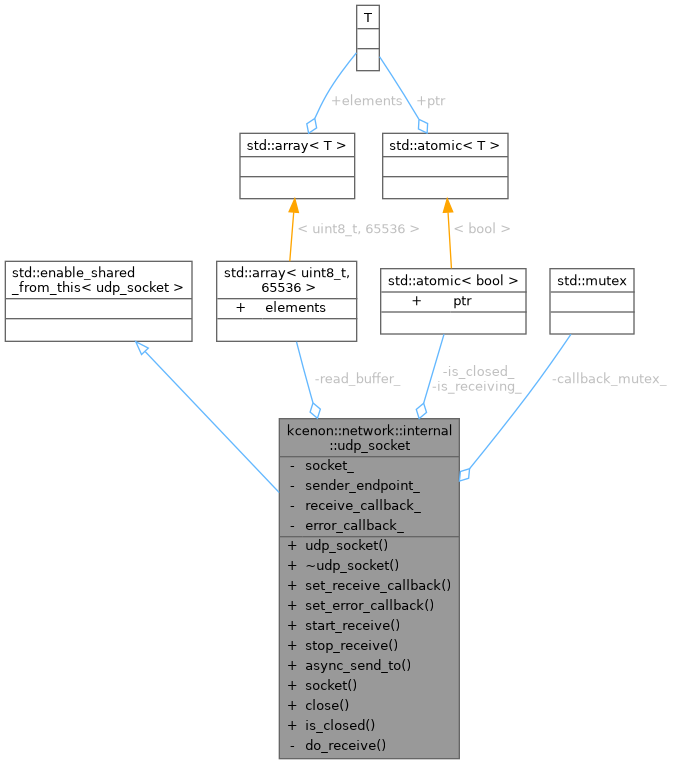
A lightweight wrapper around asio::ip::udp::socket, enabling asynchronous datagram operations.
More...
#include <udp_socket.h>
Public Member Functions | |
| udp_socket (asio::ip::udp::socket socket) | |
Constructs a udp_socket by taking ownership of a moved socket. | |
| ~udp_socket ()=default | |
| Default destructor (no special cleanup needed). | |
| auto | set_receive_callback (std::function< void(const std::vector< uint8_t > &, const asio::ip::udp::endpoint &)> callback) -> void |
| Sets a callback to receive inbound datagrams. | |
| auto | set_error_callback (std::function< void(std::error_code)> callback) -> void |
| Sets a callback to handle socket errors (e.g., receive/send failures). | |
| auto | start_receive () -> void |
| Begins the continuous asynchronous receive loop. | |
| auto | stop_receive () -> void |
| Stops the receive loop to prevent further async operations. | |
| auto | async_send_to (std::vector< uint8_t > &&data, const asio::ip::udp::endpoint &endpoint, std::function< void(std::error_code, std::size_t)> handler) -> void |
Initiates an asynchronous send of the given data to endpoint. | |
| auto | socket () -> asio::ip::udp::socket & |
Provides direct access to the underlying asio::ip::udp::socket in case advanced operations are needed. | |
| auto | close () -> void |
| Safely closes the socket and stops all async operations. | |
| auto | is_closed () const -> bool |
| Checks if the socket has been closed. | |
Private Member Functions | |
| auto | do_receive () -> void |
Internal function to handle the receive logic with async_receive_from(). | |
Private Attributes | |
| asio::ip::udp::socket | socket_ |
| std::array< uint8_t, 65536 > | read_buffer_ |
| asio::ip::udp::endpoint | sender_endpoint_ |
| std::mutex | callback_mutex_ |
| std::function< void(const std::vector< uint8_t > &, const asio::ip::udp::endpoint &)> | receive_callback_ |
| std::function< void(std::error_code)> | error_callback_ |
| std::atomic< bool > | is_receiving_ {false} |
| std::atomic< bool > | is_closed_ {false} |
Detailed Description
A lightweight wrapper around asio::ip::udp::socket, enabling asynchronous datagram operations.
Key Features
- Maintains a
socket_(from ASIO) for UDP communication. - Exposes
set_receive_callback()to handle inbound datagrams along with sender endpoint information. - Exposes
set_error_callback()for error handling. start_receive()begins an ongoing loop ofasync_receive_from().async_send_to()performs an asynchronous send to a specified endpoint.
Thread Safety
- All public methods are thread-safe. Callback registration is protected by callback_mutex_.
- ASIO operations are serialized through the io_context, ensuring read_buffer_ is only accessed by one async operation at a time.
- The provided callbacks will be invoked on an ASIO worker thread; ensure that your callback logic is thread-safe if it shares data.
UDP Characteristics
- Connectionless: Each datagram is independent.
- No guaranteed delivery: Packets may be lost, duplicated, or reordered.
- Message boundaries preserved: Each receive corresponds to one send.
Definition at line 46 of file udp_socket.h.
Constructor & Destructor Documentation
◆ udp_socket()
| kcenon::network::internal::udp_socket::udp_socket | ( | asio::ip::udp::socket | socket | ) |
Constructs a udp_socket by taking ownership of a moved socket.
- Parameters
-
socket An asio::ip::udp::socketthat must be open or at least valid.
After construction, you can call start_receive() to begin receiving datagrams. For sending, call async_send_to().
Definition at line 12 of file udp_socket.cpp.
◆ ~udp_socket()
|
default |
Default destructor (no special cleanup needed).
Member Function Documentation
◆ async_send_to()
| auto kcenon::network::internal::udp_socket::async_send_to | ( | std::vector< uint8_t > && | data, |
| const asio::ip::udp::endpoint & | endpoint, | ||
| std::function< void(std::error_code, std::size_t)> | handler ) -> void |
Initiates an asynchronous send of the given data to endpoint.
- Parameters
-
data The buffer to send over UDP (moved for efficiency). endpoint The target asio::ip::udp::endpointto send to.handler A completion handler with signature void(std::error_code, std::size_t)invoked upon completion.
The handler receives:
ec: thestd::error_codefrom the send operation,bytes_transferred: how many bytes were actually sent.
Example
- Note
- Data is moved (not copied) to avoid memory allocation.
- The original vector will be empty after this call.
Definition at line 123 of file udp_socket.cpp.
◆ close()
| auto kcenon::network::internal::udp_socket::close | ( | ) | -> void |
Safely closes the socket and stops all async operations.
This method atomically sets the closed flag before closing the socket, preventing data races between the close operation and async receive operations. Thread-safe with respect to concurrent async operations.
Definition at line 46 of file udp_socket.cpp.
◆ do_receive()
|
private |
Internal function to handle the receive logic with async_receive_from().
Upon success, it calls receive_callback_ if set with both data and sender endpoint, then schedules another receive. On error, it calls error_callback_ if available.
Definition at line 63 of file udp_socket.cpp.
◆ is_closed()
|
nodiscard |
Checks if the socket has been closed.
- Returns
- true if close() has been called on this socket.
Definition at line 58 of file udp_socket.cpp.
References is_closed_.
◆ set_error_callback()
| auto kcenon::network::internal::udp_socket::set_error_callback | ( | std::function< void(std::error_code)> | callback | ) | -> void |
Sets a callback to handle socket errors (e.g., receive/send failures).
- Parameters
-
callback A function with signature void(std::error_code), invoked when any asynchronous operation fails.
If no callback is set, errors are not explicitly handled here (beyond stopping receives).
Definition at line 26 of file udp_socket.cpp.
◆ set_receive_callback()
| auto kcenon::network::internal::udp_socket::set_receive_callback | ( | std::function< void(const std::vector< uint8_t > &, const asio::ip::udp::endpoint &)> | callback | ) | -> void |
Sets a callback to receive inbound datagrams.
- Parameters
-
callback A function with signature void(const std::vector<uint8_t>&, const asio::ip::udp::endpoint&), called whenever a datagram is successfully received. The first parameter is the data, the second is the sender's endpoint.
If no callback is set, received data is effectively discarded.
Definition at line 18 of file udp_socket.cpp.
◆ socket()
|
inline |
Provides direct access to the underlying asio::ip::udp::socket in case advanced operations are needed.
- Returns
- A reference to the wrapped
asio::ip::udp::socket.
Definition at line 137 of file udp_socket.h.
References socket_.
◆ start_receive()
| auto kcenon::network::internal::udp_socket::start_receive | ( | ) | -> void |
Begins the continuous asynchronous receive loop.
Once called, the class repeatedly calls async_receive_from(). If an error occurs, error_callback_ is triggered, stopping further receives.
Definition at line 33 of file udp_socket.cpp.
◆ stop_receive()
| auto kcenon::network::internal::udp_socket::stop_receive | ( | ) | -> void |
Stops the receive loop to prevent further async operations.
Definition at line 40 of file udp_socket.cpp.
Member Data Documentation
◆ callback_mutex_
|
private |
Protects callback registration and access.
Definition at line 169 of file udp_socket.h.
◆ error_callback_
|
private |
Error callback.
Definition at line 173 of file udp_socket.h.
◆ is_closed_
|
private |
Flag to indicate socket is closed.
Definition at line 176 of file udp_socket.h.
Referenced by is_closed().
◆ is_receiving_
|
private |
◆ read_buffer_
|
private |
Buffer for receiving datagrams (max UDP size).
Definition at line 166 of file udp_socket.h.
◆ receive_callback_
|
private |
Inbound datagram callback.
Definition at line 171 of file udp_socket.h.
◆ sender_endpoint_
|
private |
Stores the sender's endpoint during receive.
Definition at line 167 of file udp_socket.h.
◆ socket_
|
private |
The underlying ASIO UDP socket.
Definition at line 164 of file udp_socket.h.
Referenced by socket().
The documentation for this class was generated from the following files:
- src/internal/udp/udp_socket.h
- src/internal/udp_socket.cpp