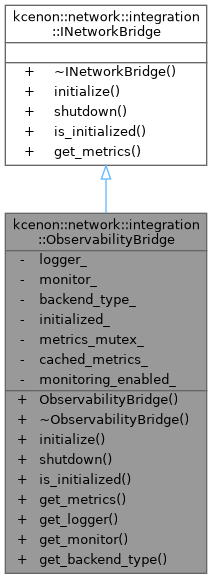
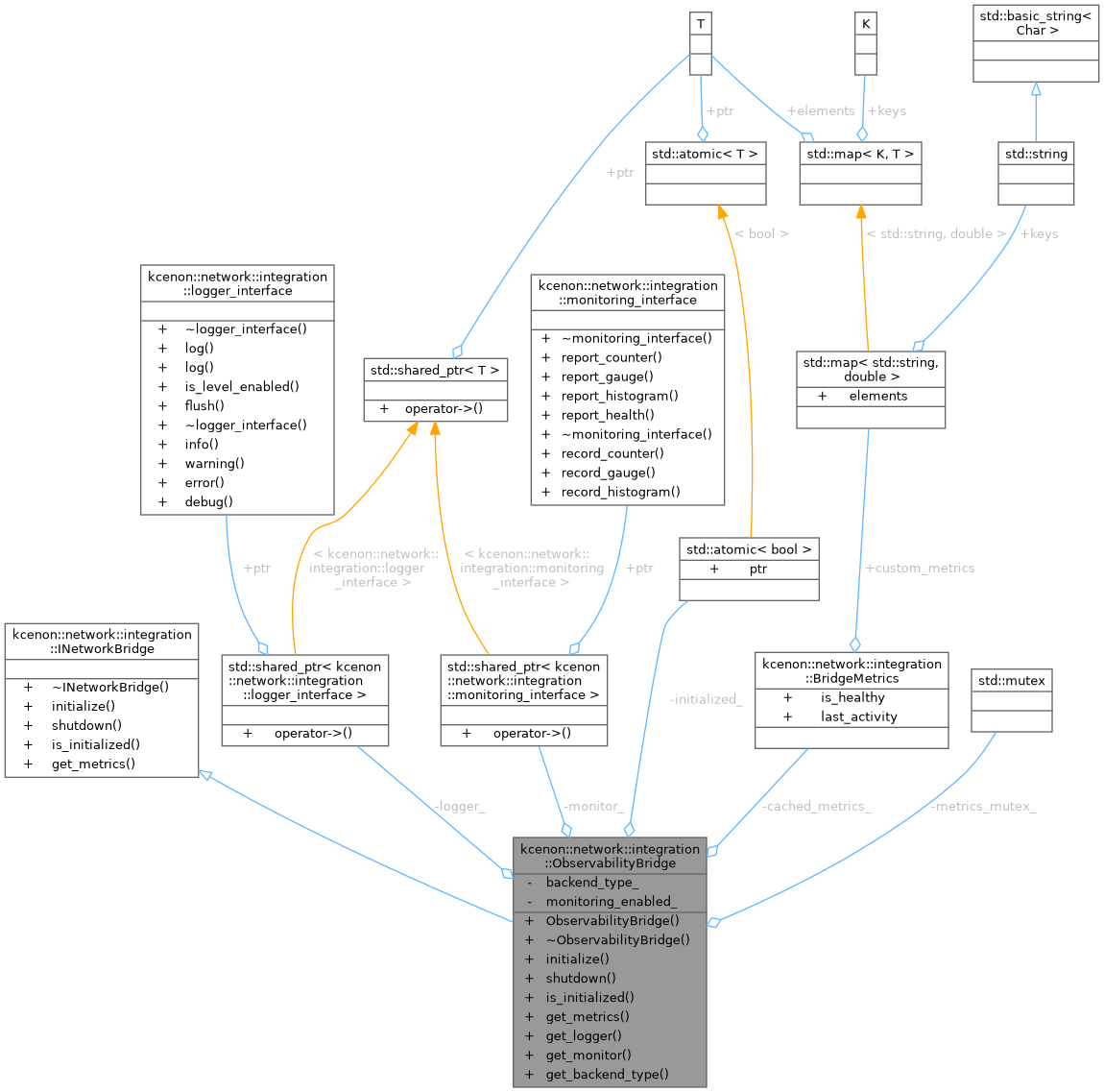
Bridge for observability (logger + monitoring) integration implementing INetworkBridge. More...
#include <observability_bridge.h>
Public Types | |
| enum class | BackendType { CommonSystem , Standalone } |
| Type of observability backend. More... | |
Public Member Functions | |
| ObservabilityBridge (std::shared_ptr< logger_interface > logger, std::shared_ptr< monitoring_interface > monitor, BackendType backend_type=BackendType::Standalone) | |
| Construct bridge with logger and monitoring interfaces. | |
| ~ObservabilityBridge () override | |
| Destructor. | |
| VoidResult | initialize (const BridgeConfig &config) override |
| Initialize the bridge with configuration. | |
| VoidResult | shutdown () override |
| Shutdown the bridge. | |
| bool | is_initialized () const override |
| Check if the bridge is initialized. | |
| BridgeMetrics | get_metrics () const override |
| Get current metrics. | |
| std::shared_ptr< logger_interface > | get_logger () const |
| Get the logger interface. | |
| std::shared_ptr< monitoring_interface > | get_monitor () const |
| Get the monitoring interface. | |
| BackendType | get_backend_type () const |
| Get the backend type. | |
 Public Member Functions inherited from kcenon::network::integration::INetworkBridge Public Member Functions inherited from kcenon::network::integration::INetworkBridge | |
| virtual | ~INetworkBridge ()=default |
Private Attributes | |
| std::shared_ptr< logger_interface > | logger_ |
| std::shared_ptr< monitoring_interface > | monitor_ |
| BackendType | backend_type_ |
| std::atomic< bool > | initialized_ {false} |
| std::mutex | metrics_mutex_ |
| BridgeMetrics | cached_metrics_ |
| bool | monitoring_enabled_ {true} |
Detailed Description
Bridge for observability (logger + monitoring) integration implementing INetworkBridge.
This class consolidates logger and monitoring integrations into a single, unified bridge. It provides factory methods for creating bridges from different backend types.
Backend Types:
- CommonSystem: Uses common_system's ILogger and IMonitor (when KCENON_WITH_COMMON_SYSTEM)
- Standalone: Uses network_system's logger_interface and monitoring_interface
Lifecycle:
- Create using factory method (from_common_system) or direct constructor
- Call initialize() with configuration
- Use get_logger() and get_monitor() to access observability interfaces
- Call shutdown() before destruction
Thread Safety:
- initialize() and shutdown() are not thread-safe (single-threaded usage)
- get_metrics() is thread-safe for concurrent queries
- get_logger() and get_monitor() are thread-safe after initialization
Definition at line 83 of file observability_bridge.h.
Member Enumeration Documentation
◆ BackendType
|
strong |
Type of observability backend.
| Enumerator | |
|---|---|
| CommonSystem | Uses common_system's ILogger and IMonitor. |
| Standalone | Uses network_system's logger_interface and monitoring_interface. |
Definition at line 89 of file observability_bridge.h.
Constructor & Destructor Documentation
◆ ObservabilityBridge()
|
explicit |
Construct bridge with logger and monitoring interfaces.
- Parameters
-
logger Logger implementation monitor Monitoring implementation backend_type Type of backend (default: Standalone)
- Exceptions
-
std::invalid_argument if logger or monitor is nullptr
Example:
Definition at line 10 of file observability_bridge.cpp.
◆ ~ObservabilityBridge()
|
override |
Destructor.
Automatically calls shutdown() if initialized
Definition at line 25 of file observability_bridge.cpp.
References initialized_, and shutdown().

Member Function Documentation
◆ get_backend_type()
| ObservabilityBridge::BackendType kcenon::network::integration::ObservabilityBridge::get_backend_type | ( | ) | const |
Get the backend type.
- Returns
- Type of backend this bridge uses
Definition at line 142 of file observability_bridge.cpp.
References backend_type_.
◆ get_logger()
| std::shared_ptr< logger_interface > kcenon::network::integration::ObservabilityBridge::get_logger | ( | ) | const |
Get the logger interface.
- Returns
- Shared pointer to logger, or nullptr if not initialized
Thread Safety: Safe to call after initialization
Example:
Definition at line 134 of file observability_bridge.cpp.
References logger_.
◆ get_metrics()
|
overridevirtual |
Get current metrics.
- Returns
- Bridge metrics including observability statistics
Custom Metrics:
- "backend_type": Backend type (0=CommonSystem, 1=Standalone)
- "monitoring_enabled": 1.0 if monitoring is enabled, 0.0 otherwise
- "logger_available": 1.0 if logger is available, 0.0 otherwise
- "monitor_available": 1.0 if monitor is available, 0.0 otherwise
Thread Safety: Safe to call concurrently
Implements kcenon::network::integration::INetworkBridge.
Definition at line 109 of file observability_bridge.cpp.
References backend_type_, cached_metrics_, kcenon::network::integration::BridgeMetrics::custom_metrics, initialized_, kcenon::network::integration::BridgeMetrics::is_healthy, kcenon::network::integration::BridgeMetrics::last_activity, logger_, metrics_mutex_, monitor_, and monitoring_enabled_.
◆ get_monitor()
| std::shared_ptr< monitoring_interface > kcenon::network::integration::ObservabilityBridge::get_monitor | ( | ) | const |
Get the monitoring interface.
- Returns
- Shared pointer to monitoring interface, or nullptr if not initialized
Thread Safety: Safe to call after initialization
Example:
Definition at line 138 of file observability_bridge.cpp.
References monitor_.
◆ initialize()
|
overridevirtual |
Initialize the bridge with configuration.
- Parameters
-
config Configuration parameters
- Returns
- ok() on success, error_info on failure
Configuration Properties:
- "enabled": "true" or "false" (default: "true")
- "log_level": Minimum log level (informational)
- "enable_monitoring": Enable/disable monitoring (default: "true")
Error Conditions:
- Already initialized
- Logger or monitor is null
- Invalid configuration
Example:
Implements kcenon::network::integration::INetworkBridge.
Definition at line 31 of file observability_bridge.cpp.
References kcenon::network::error_codes::common_errors::already_exists, backend_type_, cached_metrics_, config, kcenon::network::integration::BridgeMetrics::custom_metrics, kcenon::network::error_void(), initialized_, kcenon::network::error_codes::common_errors::invalid_argument, kcenon::network::integration::BridgeMetrics::is_healthy, kcenon::network::integration::BridgeMetrics::last_activity, logger_, metrics_mutex_, monitor_, monitoring_enabled_, and kcenon::network::ok().

◆ is_initialized()
|
overridevirtual |
Check if the bridge is initialized.
- Returns
- true if initialized and ready, false otherwise
Implements kcenon::network::integration::INetworkBridge.
Definition at line 105 of file observability_bridge.cpp.
References initialized_, logger_, and monitor_.
◆ shutdown()
|
overridevirtual |
Shutdown the bridge.
- Returns
- ok() on success, error_info on failure
Shuts down the bridge and flushes any buffered logs. Logger and monitor lifecycle is managed externally.
This method is idempotent - multiple calls are safe.
Implements kcenon::network::integration::INetworkBridge.
Definition at line 80 of file observability_bridge.cpp.
References cached_metrics_, initialized_, kcenon::network::integration::BridgeMetrics::is_healthy, kcenon::network::integration::BridgeMetrics::last_activity, logger_, metrics_mutex_, and kcenon::network::ok().
Referenced by ~ObservabilityBridge().


Member Data Documentation
◆ backend_type_
|
private |
Definition at line 252 of file observability_bridge.h.
Referenced by get_backend_type(), get_metrics(), and initialize().
◆ cached_metrics_
|
mutableprivate |
Definition at line 255 of file observability_bridge.h.
Referenced by get_metrics(), initialize(), and shutdown().
◆ initialized_
|
private |
Definition at line 253 of file observability_bridge.h.
Referenced by get_metrics(), initialize(), is_initialized(), shutdown(), and ~ObservabilityBridge().
◆ logger_
|
private |
Definition at line 250 of file observability_bridge.h.
Referenced by get_logger(), get_metrics(), initialize(), is_initialized(), ObservabilityBridge(), and shutdown().
◆ metrics_mutex_
|
mutableprivate |
Definition at line 254 of file observability_bridge.h.
Referenced by get_metrics(), initialize(), and shutdown().
◆ monitor_
|
private |
Definition at line 251 of file observability_bridge.h.
Referenced by get_metrics(), get_monitor(), initialize(), is_initialized(), and ObservabilityBridge().
◆ monitoring_enabled_
|
private |
Definition at line 256 of file observability_bridge.h.
Referenced by get_metrics(), and initialize().
The documentation for this class was generated from the following files:
- src/internal/integration/observability_bridge.h
- src/integration/observability_bridge.cpp