Loading...
Searching...
No Matches
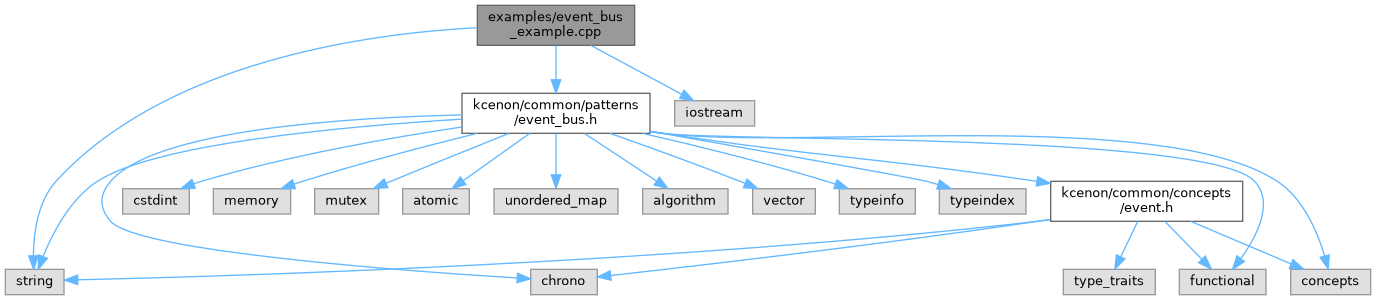
Include dependency graph for event_bus_example.cpp:
Go to the source code of this file.
Classes | |
| struct | user_logged_in |
| struct | order_placed |
| struct | system_alert |
Functions | |
| int | main () |
Function Documentation
◆ main()
| int main | ( | ) |
Definition at line 40 of file event_bus_example.cpp.
41{
42 std::cout << "=== Event Bus Example ===\n\n";
43
45
46 // Subscribe to user login events
47 std::cout << "1. Subscribing to events...\n";
50 { std::cout << " [Auth] User '" << e.username << "' logged in from " << e.ip_address << "\n"; });
51
54 { std::cout << " [Audit] Login recorded for '" << e.username << "'\n"; });
55
56 // Subscribe to order events
59 { std::cout << " [Orders] Order #" << e.order_id << " placed, total: $" << e.total << "\n"; });
60
61 // Set error callback
62 bus.set_error_callback([](const std::string& error, size_t, uint64_t)
64
65 // Publish events
66 std::cout << "\n2. Publishing events...\n";
68 bus.publish(order_placed{1001, 59.99});
69
70 // Unsubscribe audit logger
71 std::cout << "\n3. Unsubscribing audit logger...\n";
72 bus.unsubscribe(audit_sub);
73
74 // Publish again — only auth handler receives
75 std::cout << "\n4. Publishing after unsubscribe...\n";
77
78 // Priority ordering
79 std::cout << "\n5. Priority-ordered publishing...\n";
82 { std::cout << " [Alert] severity=" << e.severity << ": " << e.message << "\n"; });
83
86
87 // Cleanup
88 bus.unsubscribe(login_sub);
89 bus.unsubscribe(order_sub);
90 bus.unsubscribe(alert_sub);
91
92 std::cout << "\nDone.\n";
93 return 0;
94}
Definition event_bus_example.cpp:29
Definition event_bus_example.cpp:35
Definition event_bus_example.cpp:23
References kcenon::common::get_event_bus().
Here is the call graph for this function:
